Advanced Materials
This page provides access to the official GitHub repositories used throughout the course and related project work. The repositories are designed for students/researchers with a background in robotics and control engineering who wish to move beyond theory and engage with practical implementations, simulations, and experimental workflows. Together, they cover the full spectrum from foundational control examples, to safety-aware learning environments, and finally to integrated autonomous systems such as drone racing.
Jupyter notebooks from the course "Control for Robotics: From Optimal Control to Reinforcement Learning".
This repository contains programming exercises and solutions for the "Advanced Robot Learning and Decision Making" course offered at the University of Toronto Institute for Aerospace Studies (UTIAS). The course covers advanced topics in robot learning, decision-making, and control, providing students with hands-on experience through practical programming assignments.
LSY Drone Racing is a course project designed to help you develop and evaluate autonomous drone racing algorithms — both in simulation and on real Crazyflie hardware. Whether you’re new to drones or an experienced developer, this project provides a structured and practical way to explore high-speed autonomy, control, and perception in dynamic environments.

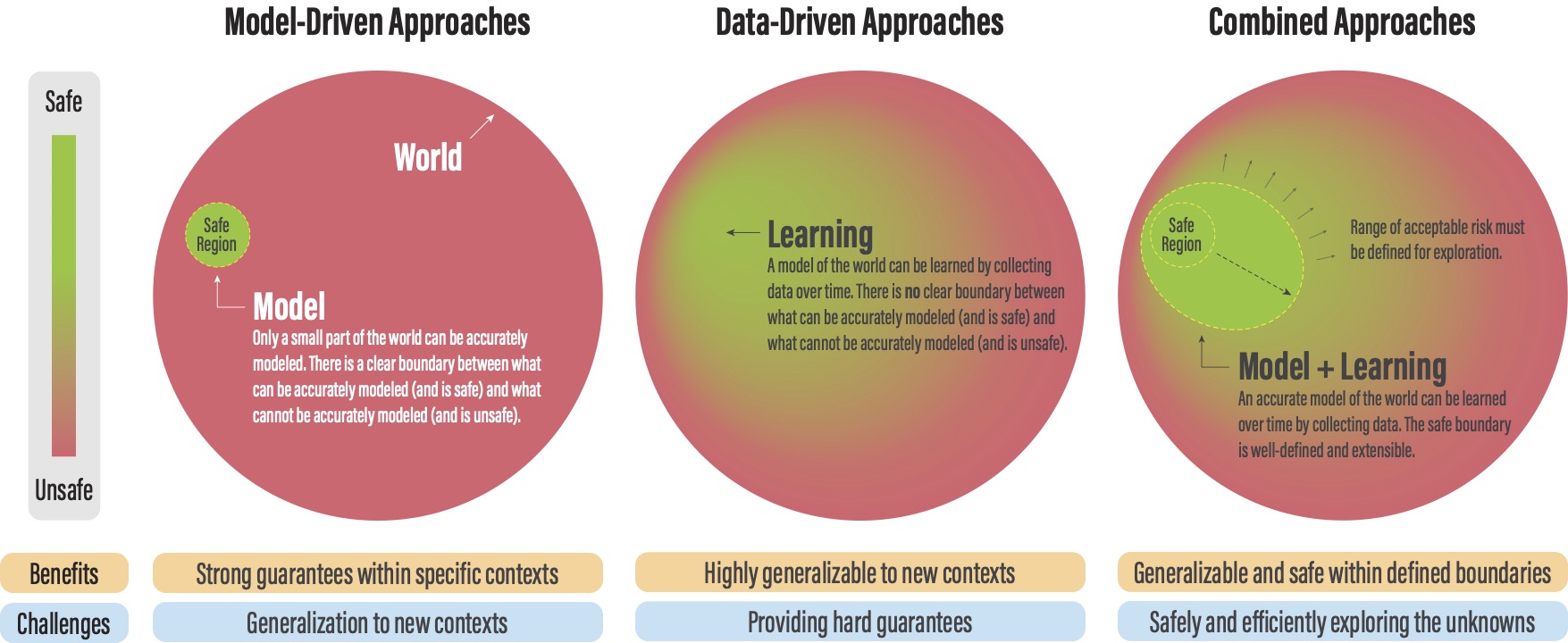
Physics-based CartPole and Quadrotor Gym environments (using PyBullet) with symbolic a priori dynamics (using CasADi) for learning-based control, and model-free and model-based reinforcement learning (RL). Many algorithms in covered in "Control for Robotics" are implemented here.