UTIAS_vicon_02022022
Description
This dataset was collected at the UTIAS vicon testbed which is flight arena of dimensions 7m × 8m × 3.5m. The arena is equipped with 8 UWB anchors installed at the corners of the room and a Vicon motion capture system for ground truth. A picture of the tested with the anchors and the MAV is shown below.

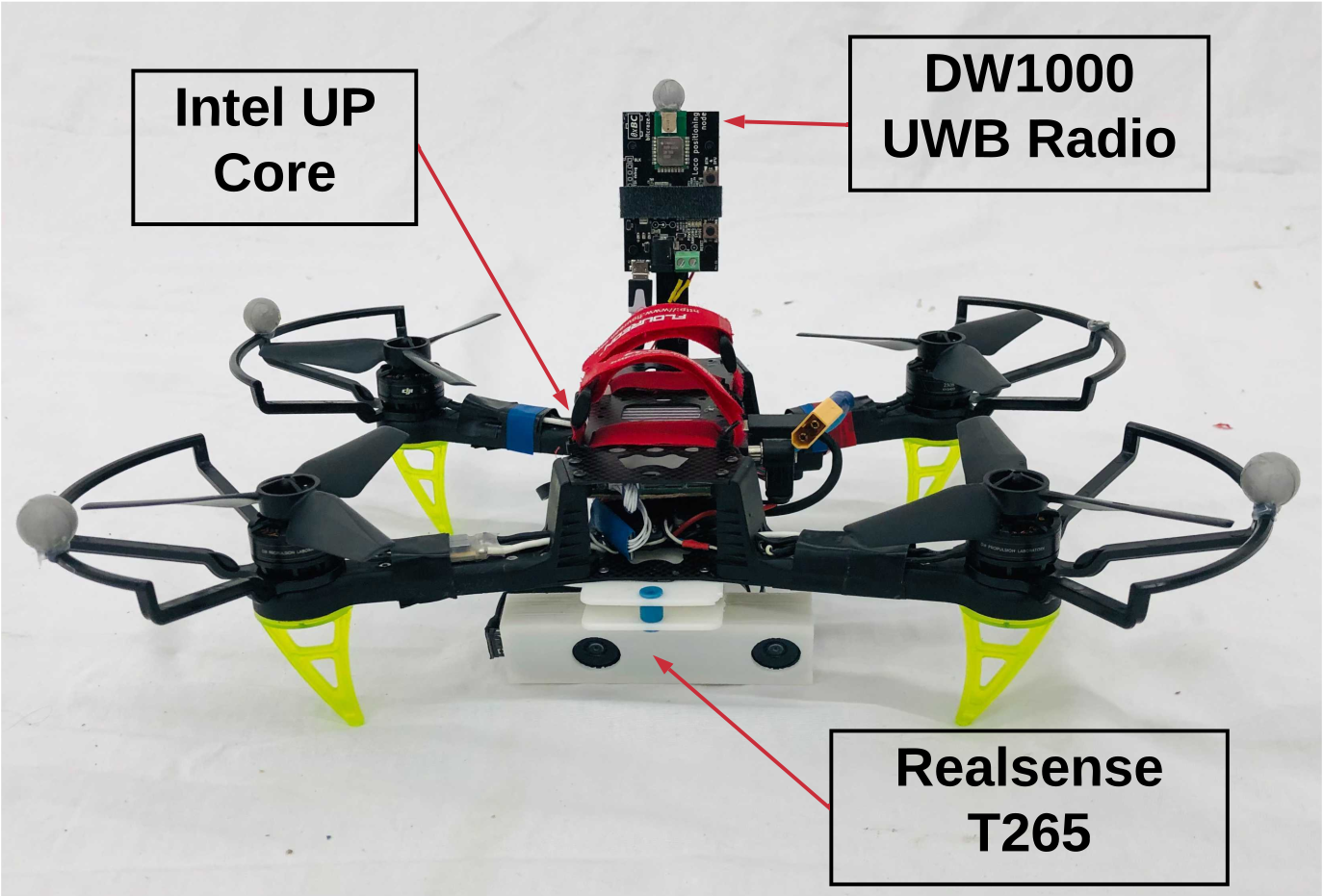
The test platform is a custom-built 220mm size quadrotor with a single UWB tag, an Intel Realsense T265 tracking camera, and an Intel UP board computer. For each trial, the MAV was flown manually along arbitrary trajectories. All the sensor data was recorded on the onboard computer in each case.
Experiments
A video of one of the manual flights is shown below.
Comments
- The T265 tracking camera makes a 20 degree pitch angle with respect to the body-frame. Unlike the other datasets, the VIO data is not gravity aligned in this dataset.
- Range measurements from UWB radios are susceptible to systematic and spatial-varying biases (Zhao et al., 2021). It is recommended to either compensate for the systematic biases using a calibration procedure or estimate the spatial biases online to achieve good positioning accuracy.
- Spatial offsets of the UWB radio and the T265 camera with respect body frame can be found in the corresponding config file.
Data files
The dataset can be downloaded from here: UTIAS_vicon_02022022
References
This dataset has been used in:
- Goudar, A., Zhao, W., Barfoot, T. D., & Schoellig, A. P. (2022). Gaussian Variational Inference with Covariance Constraints Applied to Range-only Localization. 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2872–2879. https://doi.org/10.1109/IROS47612.2022.9981520
- Dümbgen, F., Holmes, C., & Barfoot, T. D. (2023). Safe and Smooth: Certified Continuous-Time Range-Only Localization. IEEE Robotics and Automation Letters, 8(2), 1117–1124. https://doi.org/10.1109/LRA.2022.3233232.